हामी चीनमा सबैभन्दा व्यावसायिक FA वन-स्टप आपूर्तिकर्ताहरू मध्ये एक हौं। हाम्रा मुख्य उत्पादनहरू जसमा सर्वो मोटर, प्लानेटरी गियरबक्स, इन्भर्टर र PLC, HMI समावेश छन्। Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron र आदि सहितका ब्रान्डहरू; ढुवानी समय: भुक्तानी प्राप्त गरेपछि ३-५ कार्य दिन भित्र। भुक्तानी तरिका: T/T, L/C, PayPal, West Union, Alipay, Wechat र यस्तै अन्य।
| वस्तु | निर्दिष्टीकरणहरू |
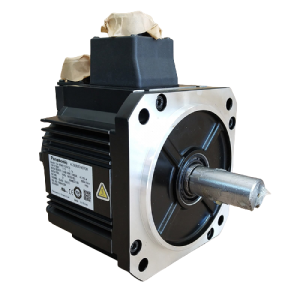
| भाग नम्बर | MHMD042G1A को परिचय |
| विवरणहरू | उच्च जडत्व, लिड तार प्रकार, IP65 |
| पारिवारिक नाम | मिनास ए५ |
| शृङ्खला | MHMD शृङ्खला |
| प्रकारहरू | उच्च जडत्व |
| सुरक्षा वर्ग | आईपी ६५ |
| घेराको बारेमा | आउटपुट शाफ्ट र लिडवायर एन्डको घुम्ने भाग बाहेक। |
| वातावरणीय अवस्थाहरू | थप विवरणहरूको लागि, कृपया निर्देशन पुस्तिका हेर्नुहोस्। |
| फ्ल्यान्ज वर्ग आयाम | ६० मिमी वर्ग। |
| फ्ल्यान्ज वर्ग आयाम (एकाइ: मिमी) | 60 |
| मोटर लिड-आउट कन्फिगरेसन | लिड तार |
| मोटर एन्कोडर कनेक्टर | लिड तार |
| विद्युत आपूर्ति क्षमता (kVA) | ०.९ |
| भोल्टेज विशिष्टताहरू | २०० वी |
| मूल्याङ्कन गरिएको आउटपुट | ४०० वाट |
| मूल्याङ्कन गरिएको वर्तमान (A (rms)) | २.६ |
| ब्रेक समात्दै | बिना |
| तौल (किलोग्राम) | १.४ |
| तेल छाप | बिना |
| खाँबो | गोलो |
| मूल्याङ्कन गरिएको टर्क (N ⋅ m) | १.३ |
| क्षणिक अधिकतम शिखर टर्क (N ⋅ m) | ३.८ |
| अधिकतम धारा (A (op)) | ११.० |
| पुनर्जन्म ब्रेक आवृत्ति (समय/मिनेट) | विकल्प बिना: कुनै सीमा छैन विकल्प सहित: कुनै सीमा छैन विकल्प (बाह्य पुनर्जन्म प्रतिरोधक) भाग नम्बर: DV0P4283 |
| पुनर्जन्म ब्रेक फ्रिक्वेन्सीको बारेमा | कृपया [मोटर स्पेसिफिकेशन विवरण], नोट: १, र २ को विवरणहरू हेर्नुहोस्। |
| मूल्याङ्कन गरिएको परिक्रमा गति (r/मिनेट) | ३००० |
| मूल्याङ्कन गरिएको घुमाउने अधिकतम गति (r/मिनेट) | ५००० |
| रोटरको जडत्वको क्षण (x१०)-4किलो ⋅ वर्गमीटर) | ०.६७ |
| लोड र रोटरको जडत्वको क्षण अनुपात सिफारिस गरिएको छ | ३० पटक वा कम |
| लोड र रोटरको सिफारिस गरिएको जडत्व क्षण अनुपातको बारेमा | कृपया [मोटर स्पेसिफिकेशन विवरण] को विवरणहरू हेर्नुहोस्, नोट: ३। |
| रोटरी एन्कोडर: निर्दिष्टीकरण | २०-बिट वृद्धिशील प्रणाली |
| रोटरी एन्कोडर: रिजोल्युसन | १०४८५७६ |
अनुमतियोग्य भार
| वस्तु | निर्दिष्टीकरणहरू |
| एसेम्बलीको समयमा: रेडियल लोड P-दिशा (N) | ३९२ |
| एसेम्बलीको समयमा: थ्रस्ट लोड A-दिशा (N) | १४७ |
| एसेम्बलीको समयमा: थ्रस्ट लोड B-दिशा (N) | १९६ |
| सञ्चालनको क्रममा: रेडियल लोड P-दिशा (N) | २४५ |
| सञ्चालनको क्रममा: थ्रस्ट लोड A, B-दिशा (N) | 98 |
| अनुमतियोग्य भारको बारेमा | विवरणहरूको लागि, [मोटर स्पेसिफिकेशन विवरण] "आउटपुट शाफ्टमा अनुमतियोग्य लोड" हेर्नुहोस्। |
१० वाट देखि ७.५ किलोवाट, चालकको लागि इनपुट पावर सप्लाई: भोल्टेज DC २४ V/४८ V・एसी १०० V/२०० V/४०० V, २० बिट वृद्धिशील・१७ बिट एब्सोल्युट/इन्क्रिमेन्टल इन्कोडर, फ्रिक्वेन्सी रेस्पोन्स २.३ किलोहर्ट्ज
छिटो र सटीक चाल महसुस गर्दछ। द्रुत प्रतिक्रिया र उच्च-परिशुद्धता स्थिति
नयाँ एल्गोरिथ्म अपनाइयो"दुई-डिग्री-स्वतन्त्रता नियन्त्रण"(2DOF) उत्पादकता र मेसिनिंग शुद्धता सुधार गर्न।
परम्परागत मोडेलमा, किनभने हामीले छुट्टाछुट्टै फिडफर्वार्ड नियन्त्रण र प्रतिक्रिया नियन्त्रणहरू समायोजन गर्न सकेनौं, अर्को शब्दमा भन्नुपर्दा, यदि हामीले केवल समायोजन गर्यौं भने पनि"दृष्टिकोण"फिडफर्वार्डको, यसको सम्बन्ध थियो"बसोबास गर्दै"प्रतिक्रिया नियन्त्रणको लागि, पारस्परिक समायोजन आवश्यक थियो।